

Minirrobot je schopen několik měsíců samostatně fungovat ve kapalině. Přestože náklady na výrobu robota jsou velmi nízké, nároky na jeho vývoj byly značné.
Vývoj mikrorobota
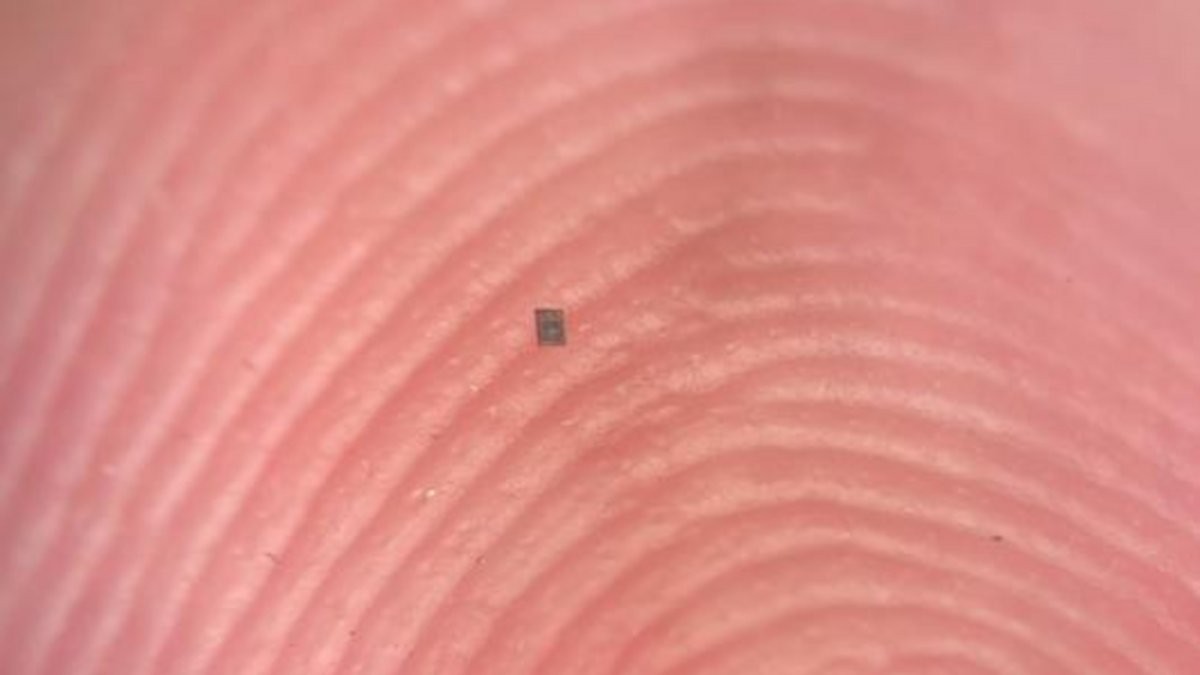
Tým vědců z University of Pennsylvania a University of Michigan vyvinul nejmenší, plně programovatelný autonomní robot na světě. Jeho rozměry činí pouze 200 µm x 300 µm x 50 µm, a přesto je schopen samostatně vnímat své okolí a na něj reagovat. Robot je napájen malými solárními články a je vybaven iontovým pohonem pro plavání.
Ve studii „Mikroskopické roboty, které vnímají, myslí, jednají a počítají“, publikované v časopise Science Robotics, vědci popsali, jak mnoho technologií vměstnali do tak malého robota. Hlavní součástí robota je počítač, který vyvinul David Blaauw, profesor na University of Michigan a držitel rekordu za nejmenší počítač na světě. Marc Miskin, asistentský profesor na University of Pennsylvania a vedoucí projektu mikrorobota, se s Blaauwem poprvé setkal před pěti lety na akci agentury Defense Advanced Research Projects Agency (DARPA) a zjistil, že Blaauwův malý počítač je ideální pro mikrorobota.
Mikroprocesor a jeho výzvy
Integrace mikroprocesoru a robota tak, aby obě zařízení fungovala hladce, se ukázala složitější, než se původně očekávalo. Zejména dodávka energie byla výzvou, protože robot musel zůstat autonomní. Vědci použili solární články, které generují pouze 75 nanowattů energie, což je více než 100 000krát méně než potřebuje chytrá hodinka, jak vysvětluje Blaauw. To vyžadovalo přepracování elektroniky stávajícího mikroprocesoru, aby fungoval při extrémně nízkých napětích. Tým se podařilo snížit spotřebu energie počítače tisíckrát.
Solární články však zaberou většinu místa v robotovi. Proto zbývalo málo prostoru pro procesor a paměť, což limitovalo jejich velikost. Vědci se rozhodli komprimovat programování počítače, aby se vešlo do dostupné paměti. „Museli jsme zcela přepracovat instrukce počítačového programu, a to, co by za normálních okolností vyžadovalo mnoho pokynů pro řízení pohonu, jsme zkoncentrovali do jediné speciální instrukce, abychom zkrátili délku programu na velikost, která se vejde do malého prostoru robota,“ říká Blaauw.
Komunikace a senzorika
Programování a přenos programu do počítače se provádí pomocí světelných impulzů. Každý robot má svou vlastní adresu, přes kterou probíhá programování a přenos. Roboty mohou být programovány pro různé úkoly, aby pracovaly společně na dosažení společného cíle.
Součástí elektroniky robota jsou také tepelné senzory, které dokážou měřit okolní teplotu s přesností na třetinu stupně. Robot je schopen též rozpoznávat a hlásit teploty a orientovat se směrem k rostoucím teplotám, nebo se od nich vzdálit. To umožňuje například měřit teplotu buněk, která je považována za indikátor zdraví. Vědci monitorují zdravotní stav jednotlivých buněk tím, že robot „tancuje“ teplotou. Pohyby robota jsou řízeny tak, že teplota je zakódována; vědci je poté dekódují pomocí mikroskopu, což je podobné způsobu, jakým včely sdělují informace pomocí tancujících pohybů.
Iontový pohon bez mechanických součástí
Aby byl robot schopen se pohybovat v kapalině, museli vědci vyvinout speciální pohonný koncept, protože takový robot je díky své velikosti vystaven silám závislým na objemu, jako je gravitace a setrvačnost. U mikrometrických robotů přebírají kontrolu síly související s povrchem, jako je odpor a viskozita. Miskin upozorňuje, že „pohyb vody je jako pohyb v dehtu“. Vědci se proto rozhodli nepoužívat mechanické pohony, protože by bylo obtížné je zmenšit na mikrometrické rozměry a mohly by se snadno poškodit.
Namísto toho se zaměřili na iontový pohon, který zcela postrádá mechanické součásti. Místo toho je vytvářeno elektrické pole, které uvolňuje ionty do kapaliny kolem robota, a tím se pohybuje blízké molekuly tekutiny a uvádí kapalinu kolem robota do pohybu. „Je to, jako kdyby byl robot v proudící řece,“ říká Miskin, „ale robot také způsobuje, že se tok pohybuje.“ Efekt lze regulovat změnami elektrického pole. Robot se tak může pohybovat v komplexních vzorech rychlostí až jednu délku svého těla za sekundu. Kromě toho je pohonný systém velmi robustní, protože nevyžaduje mechanické části. Mikroroboty s tímto pohonem mohou být zachyceny mikropipetou a přesunuty z jedné biologické vzorky do druhé, aniž by došlo k poškození robota.
Autonomní fungování a náklady
Robot se může pohybovat v kapalině po dobu několika měsíců, pokud solární články zachytávají světlo. Osvětlení LED poskytuje potřebnou energii. Robot není externě řízen magnetickými poli, světlem nebo rádiem. Malý počítač, iontový pohon a solární články mu umožňují být zcela autonomní. Na vývoji autonomního mikrorobota vědci pracovali celkem pět let.
„To je opravdu jen první kapitola,“ říká Miskin. „Ukázali jsme, že je možné začlenit mozek, senzor a motor do něčeho tak malého, že se to skoro nedá vidět, a že to může přežít a fungovat měsíce. Jakmile máte tuto základnu, můžete přidat všechny druhy inteligence a funkcionality. To otevírá dveře k zcela nové budoucnosti pro mikro robotiku.“
Budoucí mikroroboty by mohly být ještě výkonnější, realizovat složitější programy, obsahovat nové senzory a pohybovat se rychleji, aby mohly navigovat v složitějších prostředích, říkají vědci. Současná platforma ukazuje, že je to možné i za nízké náklady: aktuální robot lze vyrobit za pouhý jeden cent.